
New Weapons, Proven Precedent: Elements of and Models for a Treaty on Killer Robots
This leaflet explains a basic model of how a treaty to address autonomous weapons could be structured, and illustrates how that structure responds to the problems that increased autonomy in weapons systems raise.
Article 36’s new leaflet ‘Regulating autonomy in weapons systems’ explains with graphics and visuals a basic model of how a treaty to address autonomous weapons could be structured – and illustrates how that structure responds to the problems that increased autonomy in weapons systems raise.
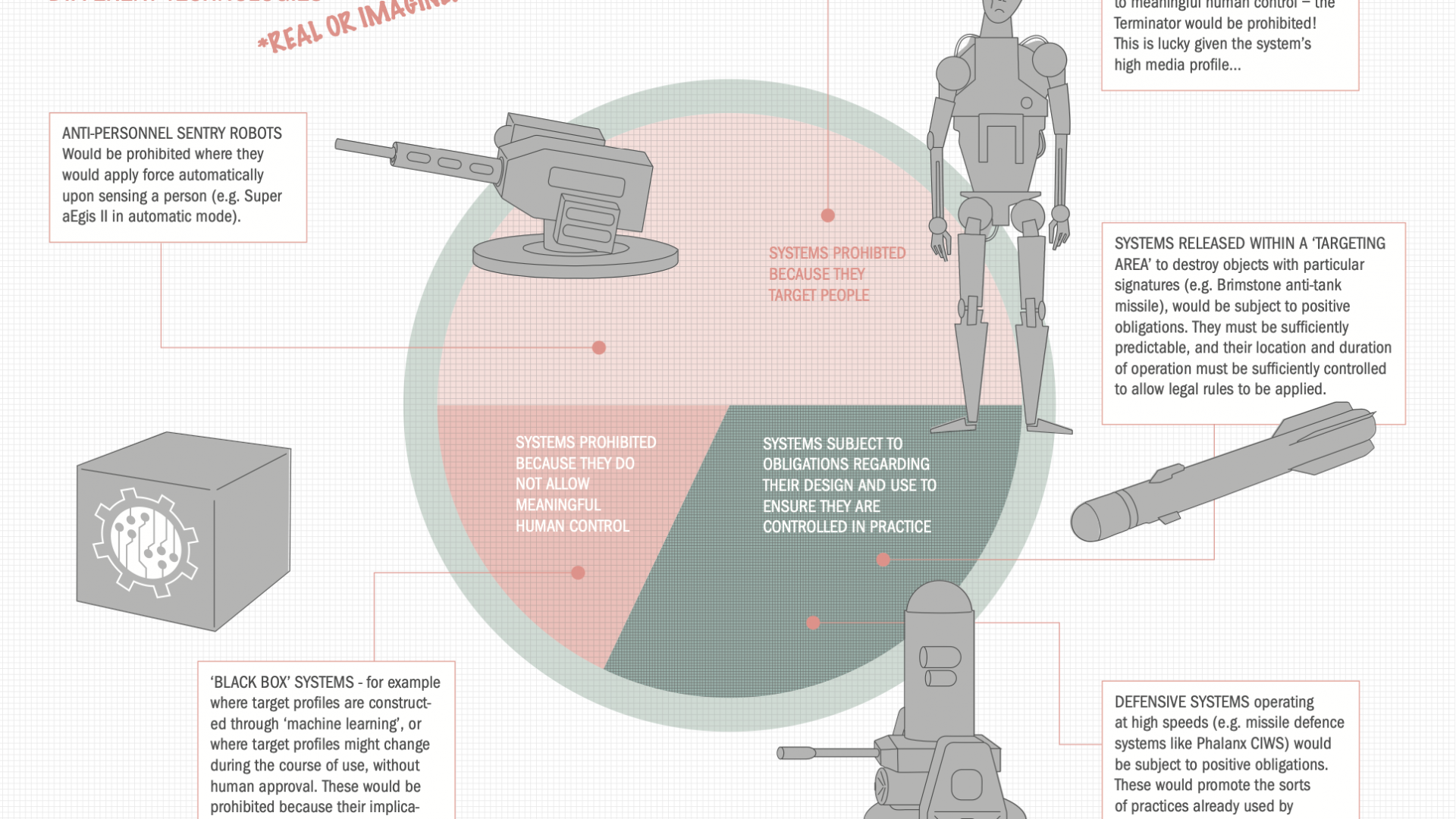
An effective structure for international legal regulation would prohibit certain configurations – such as systems that target people, and those that can’t be meaningfully controlled – and require positive obligations for meaningful human control over others, within a broad scope of sensor-based weapons systems that employ a particular process to apply force: that of matching sensor inputs to a “target profile” of characteristics following a system’s activation, emplacement, or deployment.
This publication can be found on the Article 36 website, available in 7 languages.
We are working to avoid a dehumanised future, where machines can be tasked to kill and apply force without people understanding or being fully responsible for the consequences: international discussions on ‘autonomy’ in weapons systems now need to focus in detail on the specific components of a solution.

